手技の解説
アカラシアの診断治療における食道内圧測定のコツと注意点
2018 年 60 巻 5 号 p. 1095-1106
詳細
2018 年 60 巻 5 号 p. 1095-1106
High resolution esophageal manometry (HREM)はカテーテルに1cm間隔でsolid state sensorを配置した内圧測定法である.HREMを用いたシカゴ分類では食道運動障害が体系的に分類され,診断フローチャートに各パラメータの値を当てはめるだけで食道運動障害を診断できるようになった.食道アカラシアは嚥下時の食道胃接合部の弛緩不全と食道体部の蠕動運動の消失を特徴とする疾患であり,シカゴ分類では3つのタイプが提唱され,タイプにより治療反応性が異なることが報告されている.なお,HREMでは使用する機器により基準値が異なることが知られており,注意が必要である.HREMは簡便であるが,測定された値のみを重視すると診断を見誤ることもあり,食道造影検査などの他の検査も併用して,総合的に診断することが重要である.
高解像度内圧測定機器(high resolution esophageal manometry:HREM)の登場および新しい食道アカラシアに対する内視鏡治療(per-oral endoscopic myotomy:POEM)の開発に伴い,本邦でも食道運動障害の診断・治療に対する関心が高まっている.HREMを用いた新しい食道運動障害の分類であるシカゴ分類が提唱され,食道の1次蠕動波の各パラメータが自動計算されて,フローチャートに当てはめるだけで食道運動障害の診断ができることから,食道内圧測定の初心者でも診断できるようになった.こうした背景から,本邦でも食道運動障害の診療が注目されるようになり,日本消化管学会から「食道運動障害診療指針」が発刊された 1).HREMを用いた食道内圧測定は従来行われてきたconventional esophageal manometryに比べて簡便であり,シカゴ分類を用いた食道運動障害の診断も,従来の分類を用いた診断に比べて容易になっているが,いくつか注意すべき点もある.本稿では,現在広く使用されているHREMを中心に,従来行われてきたconventional manometryを含めて,食道内圧測定の手技の実際と注意点について述べる.
HREMで測定された正常の1次蠕動波を示す(Figure 1).咽頭と食道の間には上部食道括約部,食道と胃の間には下部食道括約部という高圧帯がある.嚥下をすると,咽頭の収縮とともに上部食道括約部が弛緩してボーラスが咽頭から食道に流入する.食道内のボーラスは1次蠕動波により上部食道から下部食道に運ばれる.蠕動波の出現とともに,下部食道括約部が弛緩し,食道内を運ばれてきたボーラスが胃内に流入する.1次蠕動波が終了すると弛緩していた下部食道括約部は再び高圧帯を形成し,胃から食道への逆流を防止する.

High resolution manometryで測定された正常の1次蠕動波.
High resolution manometry (ManoScan)で測定した1次蠕動波である.圧はカラー表示されており,高圧が赤で低圧が青で表示されている.上下の2箇所の高圧帯が認められ,上方の高圧帯が上部食道括約部,下方の高圧帯が食道胃接合部である.5mlの水を嚥下すると咽頭の収縮とともに上部食道括約部が弛緩し,食道内の圧が流入した水によりわずかに上昇している.上部食道括約部の弛緩後に上部食道括約部から食道胃接合部に向けて徐々に収縮する1次蠕動波が認められる.また,嚥下後から1次蠕動波が食道胃接合部に到達するまで,食道胃接合部圧が低下している.嚥下に伴う食道胃接合部の弛緩により,食道内のボーラスは胃内に流入する.
食道アカラシアでは,食道胃接合部の弛緩が障害されるとともに,食道体部の蠕動波が消失する.
食道内圧測定には,infused catheter法とintraluminal transducer法の2つの方法がある.前者はポリビニール製のカテーテルにごく少量の水を持続的に流しておき,体外のトランスデューサーにカテーテルを接続して,穴を塞ぐ圧を測定する方法であり(Figure 2-a,b),後者はカテーテルに圧トランスデューサーを配置して食道内圧を直接測定する方法である.Infused catheter法ではカテーテル代が安く,sleeve sensorが使用できる利点があるが,トランスデューサーと測定部位との高さが圧に影響するため,体位により表示される圧が異なってしまうことと,ごく少量ではあるものの水を食道内に注入することから,長時間の検査では注入した水の影響が無視できないという欠点がある.一方,intraluminal transducer法では水を注入する必要がなく,体位の影響もないが,カテーテルが高価になってしまうことと,sleeve sensorが使用できないため,呼吸性に変動する食道胃接合部圧の持続測定には工夫が必要であるという欠点がある.なお,後に説明するHREMはintraluminal transducer法を用いている.

a:Infused catheter法で使用するポンプ.
上に乗っているタンクの蒸留水が各ポートから非常にゆっくり注入される.各ポートにカテーテルを装着して圧を測定する.圧センサーはこのポートに配置されており,測定部位と圧センサーの高さを一致させなければならないため,臥位で検査を行う必要がある.
※Mui Scientific社のホームページから引用.
b:Sleeve sensorをもつinfused catheter法のカテーテル.
カテーテルは細い管がまとまっており,その一つにsleeve sensorが付けられている.細い管の数が測定部位の数であり,通常食道体部の測定部位は3-5カ所で,他に胃とsleeve sensorがある.
1個のセンサーをカテーテルに付けて,胃内に挿入して,徐々に食道に引き抜いてくると,はじめは胃内圧を示しているが,食道胃接合部では高圧になり,食道体部になると圧が低下して食道体部圧を示す.この測定方法はpull through法と呼ばれ,食道胃接合部の位置の同定や食道胃接合部圧を測定することができる.しかし,食道胃接合部の位置は呼吸性に変動しているために,1点での圧測定では食道胃接合部圧を持続して測定することができない.呼吸性に変動する食道胃接合部圧を持続的に測定するために,sleeve sensorが開発された.Sleeve sensorは6cmの受圧面の下に水を持続的に流し,受圧面にかかる最大圧を測定することができる(Figure 3).Sleeve sensorはinfused catheter法を用いており,intraluminal transducer法ではsleeve sensorを使用することができず,食道胃接合部圧を持続的に測定できなかった.HREMではセンサーが1cm間隔で配置されており,任意の間隔の最大圧を表示するe-sleeve機能が開発され,intraluminal transducer法でも食道胃接合部圧の持続的な測定が可能となった.

sleeve sensorによる食道胃接合部圧の持続測定の原理.
緑の矢印は呼気時の食道胃接合部,オレンジは吸気時の食道胃接合部の位置を示す.左側のカテーテルのように1つの穴しかない場合には,吸気時および呼気時の両方ともに,測定部位が食道胃接合部にあたっておらず,持続測定ができない.一方,真ん中のsleeve sensorがあるカテーテルでは,吸気時および呼気時でも食道胃接合部がsleeve sensorにあたっており,持続測定することができる.なお,sleeve sensorでは,赤で示した板状のsleeve sensorの下に水を流すことにより,sleeve sensor上の最大圧を測定することができる.
a.Conventional esophageal manometry
従来の食道内圧測定(conventional manometry)では,infused catheter法でもintraluminal transducer法でも,食道内の圧測定部位は5-7cm間隔で3-5カ所であった.そのために,センサー間に限局した食道運動異常を捉えることは困難であった.また,1次蠕動波の評価項目は伝達速度と蠕動波高,蠕動波の形状などであった.
b.HREM
センサーの数が限られていたconventional manometryに比べてセンサーの数を増やして多くの部位の内圧を測定するものがHREMである.Infused catheter法にもHREMがあるが,Medtoronic社のManoScan®が開発されてからは,一般的にはsolid state sensorを1cm間隔で配置したものがHREMとして広く用いられている.ManoScanなどのHREMではセンサーが1cm間隔で配置されているため,conventional manometryのような死角はなくなった.さらに,測定部位が多数あることから,従来のpressure tracingでは全体像が捉えにくいため,圧をカラーで表示する表示法が用いられており,一見して全体像を把握することができるようになった.また,conventional manometryでは使用するカテーテルによってセンサーの数やセンサー間隔が異なっていたが,HREMではセンサーが等間隔で配置されているため,1次蠕動波のパラメータを体系的に定義することが可能となった.
4.HREMを用いた食道内圧測定手技の実際本邦で薬事承認されているHREMシステムは初期のManoScan(Figure 4-a)とスターメディカル社のStarlet®(Figure 4-b)であり,ここではManoScanおよびStarletを用いたHREMの方法について解説する.

a:ManoScanのカテーテル.
36個のsolid state sensorが1cm間隔で配置されている.
※SMIT Medical Limitedのホームページから引用.
b:Unisensor社製のカテーテル.
ManoScanと同様に1cm間隔で圧センサーが配置されている.このセンサーでは圧センサー間にインピーダンスセンサーが配置されており,インピーダンスも測定することができる.
a.鼻腔の麻酔
リドカインのゼリーを用いて左右の鼻腔のどちらかの麻酔を行う.ゼリーを鼻腔から吸い込んでもらうだけでも十分麻酔を行うことができるが,経鼻内視鏡の前処置と同様に綿棒を用いても良い.また,シリンジを用いて鼻腔にゼリーを流し込む方法も有用である.リドカインで麻酔を行うと鼻汁の分泌が亢進するため,両側の鼻腔を麻酔してしまうと鼻呼吸が困難になるため,はじめは片側のみ麻酔を行い,カテーテルの挿入を試みた方が良い.
b.カテーテル挿入前の準備
HREMシステムのプロトコール通りに行う.まずは測定ソフトを起動して,患者情報を入力する.その後,ManoScanではカテーテルの圧校正専用の筒にカテーテルを挿入して,圧校正を行う.Starletではカテーテルの圧校正は通常のシステムではできないため,1回ずつ圧校正を行う必要はないが,ある程度検査回数を重ねたものはメーカーに圧校正を依頼した方が良いとされている.Starletでは圧校正は行わないが,センサーに圧が加わらないようにカテーテルを空中に保持して,ゼロ校正を行う.
なお,ManoScanでは1週間に1回37℃のお湯にカテーテルを浸して温度校正を行うことが推奨されている.
c.カテーテルの挿入
通常の検査では検査室でカテーテルの挿入を行うことができる.その際の体位は坐位でも臥位でも良い.ただし,食道が拡張し,蛇行している食道アカラシアの患者では,カテーテルを食道から胃に挿入することが困難なケースもあり,上部消化管内視鏡検査やCTで食道の拡張・蛇行がある場合には,透視下でカテーテルの挿入を行うようにしている.
i) 鼻腔ルートの挿入
麻酔した鼻腔からカテーテルを挿入する.その際に,鼻腔のルートを想像しながら挿入すると良い.具体的には,通常まっすぐにカテーテルを挿入すると鼻甲介の奥にカテーテルがあたってしまい挿入できないことがあるので,カテーテルを上から下に入れていくと挿入できることが多い.鼻中隔側彎がある被験者ではカテーテルが挿入できない場合もあり,その際には無理に挿入せず,反対側の鼻腔を再度麻酔して反対側から挿入する.鼻腔から咽頭にカテーテルが挿入できない症例があるようだが,筆者は上記の対応で鼻腔を通過しない症例は経験していない.
ii) 咽頭から食道への挿入
カテーテルが咽頭に達したら,被験者に嚥下をしてもらい,嚥下にタイミングを合わせてカテーテルを挿入する.この際に,カテーテルが気道に入ってしまうこともあるため,咳き込んだり,発声できないようであれば速やかにカテーテルを抜去する.透視下でカテーテルの挿入を行う場合には,カテーテルが食道内に挿入されたことを透視で確認することができる.
iii) 食道から胃への挿入
上記のように食道アカラシアの患者では,食道から胃への挿入が難しいケースが少なくない.拡張した食道内でカテーテルがたわんでしまったり,下部食道でカテーテルが反転してしまうことがあり,食道が拡張,蛇行している症例では透視下で挿入を試みたほうが良い.その際には,まず仰臥位での挿入を試みるが,仰臥位では挿入ができない場合には,右側臥位や左側臥位,腹臥位など体位を変えると挿入できるケースもある.しかし,こうした工夫をしても挿入できない症例もある.食道アカラシアの診断には食道胃接合部(Esophago-gastric junction)の弛緩の有無が重要であり,カテーテルが胃まで挿入できないとEGJの弛緩を測定することができないが,HREMでは無理にカテーテルに力を加えたり,トルクをかけるとカテーテルが壊れてしまう可能性があるため,無理をしないことも重要である.
d.カテーテルの位置合わせ
Sleeve sensorを用いたinfused catheter法での食道内圧測定では,まず食道胃接合部の位置を同定する必要がある.カテーテルを胃内に十分挿入した後に,徐々に引き抜いてくると,はじめは胃内圧が測定されるが,測定部位が食道胃接合部に位置すると胃内圧より高圧になる.その後,測定部位が食道になると再び圧は低下して食道体部の内圧を示す(Figure 5).この方法で,食道胃接合部の位置や長さを同定し,6cmの受圧面をもったsleeve sensorが食道胃接合部に位置するようにカテーテルを調整する.Sleeve sensorが食道胃接合部に位置していると,食道胃接合部の機能が保たれている患者ではsleeve senorの圧が胃内圧より高圧を示す.

Pull through法で測定した食道胃接合部圧.
カテーテルを胃内に挿入した後に引き抜いてくると,食道胃接合部で圧が上昇する.そのまま食道に引き抜いてくると,食道胃接合部から食道体部に入り,圧は再び低下する.赤のラインと青のラインの間が食道胃接合部である.呼吸と見比べると,胃内では吸気時に圧は上昇しているが,食道内では吸気時に圧が低下している.この圧変化の変換点がpressure inversion point (PIP)である(緑のライン).
※GI motility onlineより引用改変.
なお,胃内圧は腹腔内圧を反映しているため,吸気時には呼気時に比べて圧が上昇するが,食道は胸腔内圧を反映しているため,胃内圧とは反対に吸気時の圧は呼気時に比べて低下する.胃から食道にカテーテルを引いてくると,吸気時の圧が呼気時に比べて上昇する状態から徐々に低下するようになるが,その変換点をpressure inversion point(PIP)またはrespiratory inversion point (RIP)と呼んでいる.
HREMでは上記のような煩雑な操作は必要なく,カテーテルを胃内に挿入するだけで,食道胃接合部を高圧帯として認識することができる.ただし,解析時にはe-sleeve機能を食道胃接合部に合わせる必要があり,e-sleeve機能が食道胃接合部に合わせていないと,正しい評価ができないため,注意が必要である.
カテーテルが正しい位置にあることが確認できたら,テープでカテーテルを鼻に固定する.
e.内圧測定
食道の内圧は体位に大きく影響されるため,体位は重要である.特にinfused catheter法で行う場合には,水を送るポンプについているトランスデューサーと測定部位の高さを一致させる必要があるため,臥位で測定しなければならない.HREMを用いる場合には半坐位や左側臥位で行っている施設もあるが,1次蠕動波のパラメータは体位で異なることが報告されており,シカゴ分類では基本的には臥位で行うことになっている.
カテーテルを挿入してしばらくはカテーテルの違和感から正確な食道運動を評価することができない可能性があるため,カテーテル挿入後は検査用ベッドに横になって数分間安静にしていただく.シカゴ分類では5分間の安静が推奨されている.
5分間の安静の後に,5mlの水を10回飲んでいただく.インピーダンスも測定している場合には,水道水ではなく食塩水などを用いた方が良い.ただし,嚥下するボーラスの量や粘凋度は蠕動波高に影響するため,注意が必要である.
臥位で水を内服することは意外に難しく,高齢者では誤嚥してしまう症例も少なくない.われわれはシリンジを用いて5mlの水を口の側方に注入して誤嚥しないように注意している.また,2回以上連続で嚥下してしまう場合もあり,連続で嚥下した場合には正しい評価ができない可能性があるため,10回の評価にカウントしないようにしている.被験者には注入された水を口に含んでいただき,合図とともにできるだけ1回で嚥下してもらうように指導している.頻回に嚥下すると食道運動に疲労が生じることが知られており,水嚥下の間隔は30秒以上あけるようにする.実際にはカテーテルの違和感から嚥下がコントロールできない症例や,水嚥下の際に誤嚥してしまう症例があり,正確な評価が困難になってしまう症例もある.
Infused catheter法では増幅率を調整する必要があり,各部位で適切な増幅率を選択する必要がある.
HREMでは10回の水嚥下が終了したら,カテーテルを抜去して空気中に保持してからデータを保存する.ManoScanでは終了時にカテーテルを空気中に保持した状態の圧をゼロに設定するため,カテーテルを抜去する前に終了してはならない.Starletではこの操作は必要ないとされているが,私自身はセンサーの異常がないかを確認するためにも,この操作を行った方が良いのではないかと考えている.
f.データ解析
Conventional manometryでは蠕動波高及び蠕動波の伝達速度を測定する.蠕動波高は各測定部位での蠕動波高のピークを測定する.Conventional manometryでは自動解析できないため,これらの項目を手動で測定する必要がある.一方,HREMでは下記で紹介するシカゴ分類の各パラメータが自動的に計算される.解析ソフトで各嚥下が解析に適しているかを確認し,嚥下毎に各パラメータの解析が適切に行われているかを確認する(Figure 6-a,b).10回の嚥下のすべてを確認した後に,レポートを作成すると,各パラメータの値が自動的に表示される.

a:ManoViewでの解析.
ManoScanの解析ソフトであるManoViewを用いて解析を行う.Isobaric contourを20mmHgに合わせると,自動的に20mmHgの等圧線が示される.それぞれのパラメータの部位が適切であることを確認すると,各パラメータが自動計測される.
b:Starletでの解析.
ManoViewと同様に各パラメータが自動計測される.
従来用いられてきた食道運動障害の分類を示す(Table 1) 2).各疾患の特徴的な内圧所見をもって診断するものであり,食道内圧測定に精通していれば,十分に食道運動障害を診断することができるが,各項目が箇条書きになっていることから,それぞれの項目をチェックしなければならない.
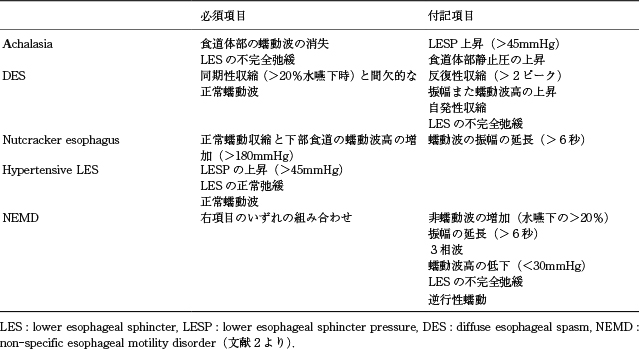
従来の食道運動障害の分類.
シカゴ分類は2009年に発表されてから,新たな知見もとにアップデートされてきた.現在の最新のシカゴ分類はv3.0である(Table 2,3) 3).従来の食道運動障害の分類を体系的にまとめたものであり,自動解析された値をフローチャートに当てはめるだけで食道運動障害を診断できるようになった(Figure 7).シカゴ分類で用いられているパラメータは,嚥下に伴う食道胃接合部弛緩の評価に使用されるintegrated relaxation pressure (IRP),1次蠕動波の強さを示すdistal contractile integral (DCI),嚥下から1次蠕動波が下部食道まで到達するまでの時間で定義されるdistal latency (DL),1次蠕動波の伝達速度を示すcontractile front velocity (CFV),食道内のボーラスに伴う圧上昇を示すintrabolus pressure (IBP)がある.IRPは嚥下後10秒間において,任意の4秒間の平均食道胃接合部圧の最小値と定義されている.1次蠕動波の強さについては,従来では蠕動波高の最大値のみが評価されてきたが,DCIでは蠕動波高だけではなく,蠕動波の長さと持続時間が加味されており,20mmHgの等圧線で囲まれる部分が計算されている.初期のシカゴ分類ではCFVでspasmが定義されていたが,蠕動波が途切れている症例などではCFVが計測できない症例も少なくないことから,最新のシカゴ分類ではDLが短いものをspasmと定義している.

シカゴ分類v3.0における食道圧変化の評価.

シカゴ分類v3.0における食道運動障害の分類.

シカゴ分類での診断フローチャート.
解析ソフトで自動測定された各パラメータの値をこのフローチャートに当てはめると診断できる.ステップ1として,IRPの値で食道胃接合部の弛緩不全の有無を確認する.食道胃接合部の弛緩不全(IRPが正常上限以上)があり,蠕動波が認められないものが食道アカラシアである.Panesophageal pressurizationがないものがType Ⅰ,panesophageal pressurizationがあるものがType Ⅱ,spasmがあるものがType Ⅲである.一方,食道胃接合部の弛緩不全があるものの,蠕動波が認められるものがEGJ outflow obstructionである.
IRP:integrated relaxation pressure,ULN:upper limit of normal,PEP:panesophaegal pressurization,DES:distal esophageal spasm,DCI:distal contractile integral,EGJ:esophago-gastric junction,DL:distal latency,IEM:ineffective esophageal motility(文献3より).
シカゴ分類では1次蠕動波の20mmHg以上の部分を評価することになっている.20mmHgの等圧線で蠕動波を囲んだ際に,蠕動波が途絶する場合をbreakとしており,5cm以上の途絶はlarge breakと定義されている.以前のシカゴ分類では,1次蠕動波が弱いものをbreakで評価していたが,最新のシカゴ分類では1次蠕動波の収縮の強さをすべてDCIで評価するようになった.
食道アカラシアでは嚥下に伴い食道内にボーラスが流入することにより,閉鎖空間となっている食道全体の圧が上昇するpanesophageal pressurizationという現象が見られる.一方で,食道胃接合部の弛緩不全がある場合には,蠕動波と食道胃接合部の間のみに圧上昇がみられるcompartmentalized esophageal pressurizationが見られる.従来pressurizationは同期性収縮と呼ばれていたが,圧上昇は必ずしも同期性の収縮により生じるだけではないことから,pressurizationという用語が用いられている.1次蠕動波の収縮の強さは20mmHgの等圧線で評価することになっているが,pressurizationは30mmHgの等圧線で評価することになっている.
シカゴ分類では上記のパラメータを用いて各疾患が定義されており,診断フローチャートでは,まず食道胃接合部弛緩の有無を評価し,その後食道体部の1次蠕動波を評価することになっている.箇条書きであった従来の分類に比べて体系的にまとめられており,初心者でも使用しやすくなっている.
シカゴ分類では食道アカラシアを3つのタイプに分けている.TypeⅠは嚥下後にpanesophageal pressurizationが見られないもので(Figure 8-a),TypeⅡは20%以上の嚥下でpanesophageal pressurizationが見られるものである(Figure 8-b).TypeⅢは20%以上の嚥下でspasmを認めるものとされている(Figure 8-c).この3つのタイプ毎に治療反応性が異なることが知られており,TypeⅡは治療反応性が良く,TypeⅢは治療反応性が悪いと報告されており 4),今後はタイプにより治療方針を選択するようになる可能性がある.

a:食道アカラシア(Type Ⅰ).
Type Ⅰの食道アカラシアの症例である.嚥下後にわずかに食道胃接合部の弛緩を認めるものの,IRPは正常上限を超えており,30mmHg以上のpanesophageal pressurizationは認められない.
b:食道アカラシア(Type Ⅱ).
Type Ⅱの食道アカラシアの症例である.嚥下後も食道胃接合部の弛緩はみられず,30mmHg以上のpanesophageal pressurizationが見られる.
c:食道アカラシア(Type Ⅲ).
Type Ⅲの食道アカラシアの症例である.食道胃接合部の弛緩不全に加えて,DLの短い(DL<4.5s)食道体部の収縮が見られている.
HREMには大きく2つのシステムがある.1つはManoScanであり,もう1つはUnisensor社製のカテーテルを使用したHREMである.両者は圧測定の方法が異なるため,測定される圧が異なることが明らかになっている.本邦で開発されたStarletはUnisensor社製のカテーテルを使用したシステムである.Unisensor社のカテーテルを使用したシステムには,Starlet以外にMedical Measurement System社製のシステムやSandhill Scientific社製のシステムなどがある.シカゴ分類のカットオフ値はManoScanのデータが用いられているため,Unisensor社製のカテーテルを用いたシステムを使用する際には,異なるカットオフ値を用いる必要がある 5).
通常のプロトコールでは検査時間は30分程度であることから大きな問題にはならないが,長時間の検査では圧センサーのドリフトにも注意が必要である.特にManoScanでは検査時間に応じて徐々に表示される圧が上昇していくことが知られている 6).ドリフトに対する修正プログラムを使用すると,ドリフトの影響を最小限にすることができる.Unisensor社製のカテーテルは比較的ドリフトが生じにくいとされているが,検査時間が長くなった場合には,検査終了後にカテーテルを空気中に保持して,ドリフトがないかを確認したほうが良い.
病歴が長い食道アカラシアの患者では,食道胃接合部圧が高くない症例もある.シカゴ分類でもAbsent peristalsisの症例でIRPが基準値上限でpressurizationがみられる場合には食道アカラシアを考慮すべきと記載されている.こうした症例では食道造影検査を行うと,食道胃接合部の通過障害の有無を評価することができるため,食道内圧測定以外の検査を併用して総合的に診断する必要がある.
一方で,IRPは高値を示しているものの,食道造影検査では食道胃接合部に有意な通過障害を認めない症例もある.シカゴ分類でもIBPの上昇を伴っていないIRPの上昇はアーチファクトの可能性があると記載されている.シカゴ分類では測定されたパラメータの値を診断基準に当てはめるだけで診断ができることがアドバンテージであるが,検査結果が病態に一致しているかを常に確認することも重要である.
食道アカラシアのタイプ分類については,治療反応性を推測できるため,臨床上有用であるが,症例によってはタイプの同定が難しいケースもある.特に,TypeⅢの食道アカラシアとEGJ outflow obstructionの鑑別は難しい場合がある.
2mlの水嚥下を2-3秒毎に5回ほど繰り返すもので,正常であれば5回の嚥下中には食道運動が抑制され,食道胃接合部は弛緩しており,最後の嚥下後には5mlの水嚥下を1回行った場合より蠕動波高の上昇した蠕動波が認められる.通常のプロトコールでは1次蠕動波が見られなかった症例や弱い蠕動波しか見られなかった症例でもMRSを行うと正常の反応が見られることがあり,MRSを行うと食道蠕動が本当に障害されているのか,または保たれているのかを評価することができるとされている.食道アカラシアの症例にMRSを行った検討では,MRSは食道アカラシアのタイプ分類にも有用であることが報告されている 7).
2.Rapid drink challenge test食道運動はボーラスの量に影響を受ける.通常のプロトコールでは5mlの水嚥下しか行わないため,異常が指摘できないが,ある程度の量の水を飲むと異常が判明する症例もある.Rapid drink challengeは200mlの水を食道内圧測定中に飲んでもらうもので,食道胃接合部の通過障害をより正確に評価することができると報告されている 8).
3.試験食を用いた食道内圧測定通常のプロトコールでは液体を嚥下した際の食道運動を評価している.しかし,水分では症状がないが固形食を食べると症状が出現する症例もある.そこで,食道内圧測定時に固形食を摂取してもらうと,より日常生活に近い状態を評価することができる 9).
HREMを用いたシカゴ分類が開発され,食道内圧測定に精通していない医師でも食道運動障害を診断できるようになった.しかし,シカゴ分類の定義には当てはまらない症例や,見かけ上IRPが高値を呈している症例もある.食道運動障害の病態生理を常に意識して,診断や治療を行っていくことが重要である.
本論文内容に関連する著者の利益相反:栗林志行(NPO法人消化器疾患治療研究推進機構)